1.5 ms の HIGH + 18.5 ms の LOW = 20.0 ms の周期でモーターが停止状態になります。
HIGH < 1.5 ms の時に前進、HIGH > 1.5 ms の時に後進するようにプログラミングされているのですが、この LRP の ESC は電源 ON で最初に HIGH < 1.5 ms になっても HIGH > 1.5 ms になっても前進するようにプロルラミングされているようで、ESC の電源 ON でプロポ側で最初に後進信号を出すと前進してしまい前進と後進が反転してしまいます。
初めて ESC を使ったのですが、ESC はこれが普通なのだろうか?
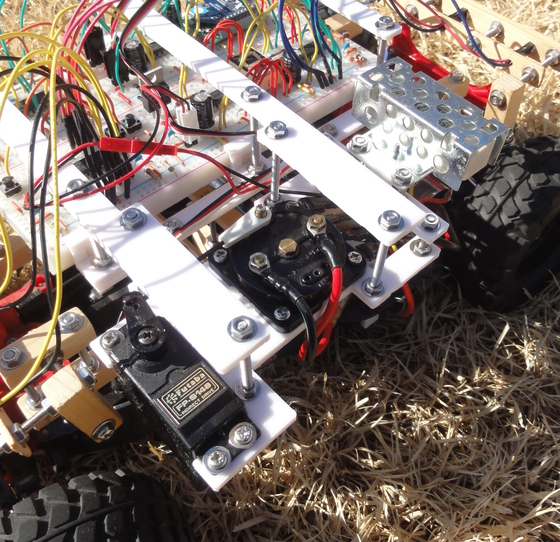
ESC は自作の FET の H ブリッジ回路のモータードライバと比べて軽くて、最大電力供給量などを調整しやすいです。
これを使うと自作の FET の H ブリッジ回路には戻れないな。
バッテリーの電圧を上げれば自作の FET の H ブリッジ回路でも高出力が可能なのだろうが、今でもブレッドボードの一部が電流の熱でとけて変形しているのでこれ以上電圧を上げるとブレッドボード的にも厳しい。